Robot-inserted needles and catheters
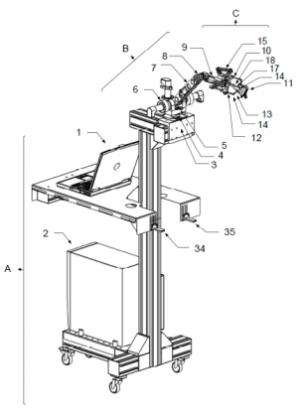
Researchers at the UPM are involved in the design of a robotic arm for precise guidance of the insertion of needles, catheters and surgical instruments in procedures of minimally invasive surgery.
This robot has a hybrid powerstrain structure which will allow a precise, repetitive, planned and controlled insertion enhancing the current procedures used so far. In addition, it has a lower cost and it requires a brief period of learning. The design, which has been patented, is the result of a joint collaboration between researchers of the High School of Industrial Engineers of the Universidad Politécnica de Madrid (UPM) and the Gliatech S.L Company.
These procedures of guided surgery, needle insertion, catheters and stents are used to take samples of fluids and tissues for biopsies and diagnosis. This robot can make precise and controlled insertions, deposition markers and a specific administration of drugs. All this is possible thanks to a virtual planning, which is based on the analysis of medical images which are previously captured with a scanner.
The development of robots for surgical use is the result of the need to enhance surgical procedures effectiveness. The technologies based on automation and robotics can improve this effectiveness thanks that they are able to integrate diverse sources of information such as medical images and their processing, and also performing real-time complex tasks.
The patented robotic device has a hybrid powertrain structure with six degrees of freedom which uses the features of the serial and parallel mechanisms and whose structure is specially designed to perform tasks of guiding and insertion. In addition, it has a system with lasers and inertial units which will allow doctors to calibrate and correct the position and orientation of surgical instruments.
These surgical instruments are attached to the distal end of the mechanism by using a coupling device that can be uncoupled depending on whether the insertion task is done by an automated robot (active) or by an expert manually guided by the robot (passive).




















