May 12, 2023 feature
This article has been reviewed according to Science X's editorial process and policies. Editors have highlighted the following attributes while ensuring the content's credibility:
fact-checked
peer-reviewed publication
trusted source
proofread
Magnetic guidewire steering at ultrahigh magnetic fields for medical imaging
 A clinical scenario of UHF actuation. The surgeon manually steers the guidewire using the magnetic fields inside the MRI scanner by observing real-time feedback from MRI images. (B to D) Guidewire bending by insertion to the MRI scanner for different magnetization configurations. The guidewire with three different configurations is presented: parallel (B), perpendicular (C), and antiparallel (D) configurations. The guidewire at a different stage of motion is overlaid. The MRI scanner's magnetic field direction is shown with an arrow. The insertion direction is shown with double arrows. (E and F) Guidewire bending by a rotation platform for parallel and perpendicular configurations. The rotating magnetic field direction shows the platform rotation. The parallel configuration rotates the guidewire tip around the MRI's magnetic field direction. The perpendicular configuration rotates the guidewire perpendicular to the MRI's magnetic field. The guidewire at a different stage of motion is overlaid. (G) Base twist actuation of the guidewire with a perpendicular magnet. The base twist is shown with a rotational arrow. The guidewire at a different stage of motion is overlaid. (H) In situ magnetization switching from antiparallel to parallel configuration during an insertion inside a constrained space. The guidewire is initially in the antiparallel configuration and leans over the solid wall during insertion into the MRI scanner due to the magnetic torque. Later, the magnetization direction switches and aligns with the MRI field. (I) The dual-magnet guidewire in parallel, perpendicular, and antiparallel configurations. The magnetization direction is shown for each separate configuration. Credit: Science Advances (2023). DOI: 10.1126/sciadv.adg6438")
Physicists and bioengineers can manipulate magnetically driven guidewires by using remote magnetic steering with scope for minimally invasive medical procedures. Magnetic steering strategies are presently limited by low magnetic fields, thereby preventing their integration in medical systems operating at ultrahigh fields, including magnetic resonance imaging (MRI) scanners. In a new study now published in Science Advances, Mehmet Tiryaki and a research team at the departments of physical intelligence, biomedical engineering, and medicine in Germany, Switzerland and Turkey, developed a magnetic guidewire design alongside steering strategies at ultrahigh fields.
The work demonstrated an extensive research scope, alongside its potential for in situ re-magnetization. The outcomes illustrated steering principles of magnetic guidance made of neodymium magnets and a fiber optic rod in a preclinical magnetic resonance imaging scanner. The newly developed ultrahigh field magnetic actuation framework can facilitate next-generation magnetic automation to function in clinical MRI scanners.
Advancing the magnetic resonance imaging (MRI) system
Despite a decade-long development of methods for magnetic resonance imaging, the technology has shortcomings compared to X-ray fluoroscopy. Although the ionizing radiation-free nature of MRI alongside its superior soft tissue contrast makes it a more advanced alternative. The MRI system is currently limited by the workspace area in the scanner and its lower resolution, leading to a range of new proposals to improve the method.
For instance, a completely remote MRI-powered actuation approach can integrate a ferromagnet permanent magnet for intuitive three-dimensional (3D) steering. However, the method requires real-time software access and added power to function inside an MRI scanner. In this work, Tiryaki and colleagues presented an ultrahigh field magnetic guidewire steering strategy in the MRI scanner and demonstrated its steering capacity in physiologically relevant 3D vascular phantoms with arterial flow, as well as during MRI scanning in the kidney of an animal model.
Magnetizing permanent magnets at ultrahigh fields
Permanent magnets such as neodymium magnets are commonly used during magnetic actuation for high magnetic torque and force transmission at low magnetic fields. Permanent magnets are developed with a constant magnetization vector aligned to the easy axis of the magnet at low magnetic fields. While physicists have studied the magnetic theory of permanent magnets at ultrahigh fields, they remain to investigate effects of the concept during automated magnetic actuation.
For instance, at ultrahigh fields, permanent magnets assume the form of soft magnets. The team therefore examined the magnetization vector and calculated the magnetic force and torque acting on permanent magnets. They focused on bulk neodymium magnets and used a vibrating sample magnetometer to deduce magnetic material constants, and studied the effects of magnetic hysteresis, to verify the strength of magnetization.
Magnetic actuation in the MRI scanner and guidewire design
Tiryaki and colleagues measured the magnetic field and magnetic gradient in the MRI scanner to model magnetic torque and force. They calculated the magnetization angle and torque acting on the permanent magnet at ultrahigh fields and investigated the design of the accompanying flexible construct that formed the elastic core of the guidewire, and optimized the stiffness of the flexible body to magnetically actuate guidewires and maneuver the magnetic actuation system.
The team used open-source software and developed a Cosserat rod model dynamic simulation to mimic the shape of the guidewire and included elastic and gravitational forces to understand their influence on MRI magnetic force and torque. They performed bending simulations to validate the Young's moduli and other parameters underlying guidewire dynamics to proactively use the magnetic guidewires.
 Magnetization at low fields, B < 0.1 T. The red and blue colors represent the direction of the easy axis (C). (B) Magnetization at high fields, B >> 0.1 T. The permanent magnet is magnetized substantially by the external magnetic field. (C) Magnetization curves of the cylindrical neodymium magnet measured inside a vibrating sample magnetometer at different θ. The magnet's magnetization in the x direction is measured, while the magnetic field is swept from 0 to 1.8 T in the x direction. (D) Magnetization vector alignment as a function of the easy axis alignment at different external field strengths. (E) Magnetic fields and gradients in the x direction of the MRI scanner. (F) Model-based magnetic torque acting on the cylindrical magnet as a function of the magnet orientation. The magnet is in its saturation regime for the solid lines and nonsaturated regime for the dashed lines. The direction of the torque is shown on the schematic. (G) Magnetic force as a function of the magnet position in the MRI scanner for different magnet orientations. The solid lines represent the force estimated with the magnetization model using the MRI magnetic field and gradient measurements. The dashed lines are the linear model estimation in the nonsaturated region. The dots are the force sensor measurements in the experiments. (H) The discretized Cosserat rod model, including the magnetic actuation. (I) Schematic of the magnetic actuation simulations. (J and K) The maximum rotation and rotation range in the simulations as a function of the guidewire thickness. Credit: Science Advances (2023). DOI: 10.1126/sciadv.adg6438")
Magnetic steering modes and in situ magnetization
The scientists studied a variety of automated magnetic actuation systems with high degrees of freedom to achieve magnetic guidewire steering at low fields. In the absence of high degrees of freedom, interactions between the magnetic actuation system and ultrahigh fields led to blocked guidewire steering in the MRI scanner. The team therefore studied the cardinal configurations of the guidewire to understand this effect and placed the permanent magnets in parallel, perpendicular, and antiparallel to the guidewire tip.
Tiryaki and colleagues explored a variety of steering modes with manual guidewire insertion in the MRI scanner to perform a variety of navigational tasks. The concept of in situ re-magnetization at ultrahigh fields led to an even more interesting magnetic guidewire design with dual stability, with two permanent magnets at the guidewire tip to conduct a variety of steering experiments in a two-dimensional plane.
 Schematic illustration of the obstacle avoidance experimental setup. The obstacles are placed in the robotic platform with remotely controlled motion in the x direction and yaw angle. The guidewire is inserted into the platform through the insertion point, and an operator manually controls the insertion and twist of the guidewire by hand at the entrance of the MRI scanner bore. The same platform is used for demonstration with three different magnetic configurations. (B) Obstacle avoidance with guidewire with a parallel magnet. The guidewire is steered to three target points shown in (i) using the platform rotation and guidewire insertion at 7 T. The magnetic gradient is used as an assistive force in (iv). (C) Obstacle avoidance experiment with a guidewire with a perpendicular magnet. The guidewire is steered to three target points shown in (i) using the platform motion in the x direction and the base twist. The operator controlled the bending of the guidewire through the magnetic field strength. The platform angle is kept the same throughout the navigation. (D) Obstacle avoidance with guidewire with an antiparallel magnet. The guidewire is steered to three target points shown in (i) using the platform motion in the x direction, base twist, and in situ remagnetization. The first two target points are reached using the antiparallel configuration's larger bending. For the last target point, the guidewire is physically constrained using the obstacles (iii) and remagnetized into the parallel configuration. Credit: Science Advances (2023). DOI: 10.1126/sciadv.adg6438")
Three-dimensional (3D) vascular navigation and guidewire steering during MRI
The team performed steering experiments in a realistic 3D vascular architecture of the renal arteries, aortic arch, common carotid artery, and middle cerebral arteries, while emulating arterial flow with a cardiac flow simulation pump. The results emphasized the capacity to navigate 3D vessels across a variety of situations for clinical applications.
Additionally, they explored ultrahigh field magnetic actuation during MRI, by performing guidewire steering experiments in the renal cavity of a porcine kidney ex vivo, with guidewires in different magnetic configurations to target various regions of the organ. They performed preclinical MRI to observe the boundaries of the renal cavity, followed by a series of visualization experiments across the renal cavity, lower calyx, and upper calyx to examine the steering capacity of the guidewire.
-
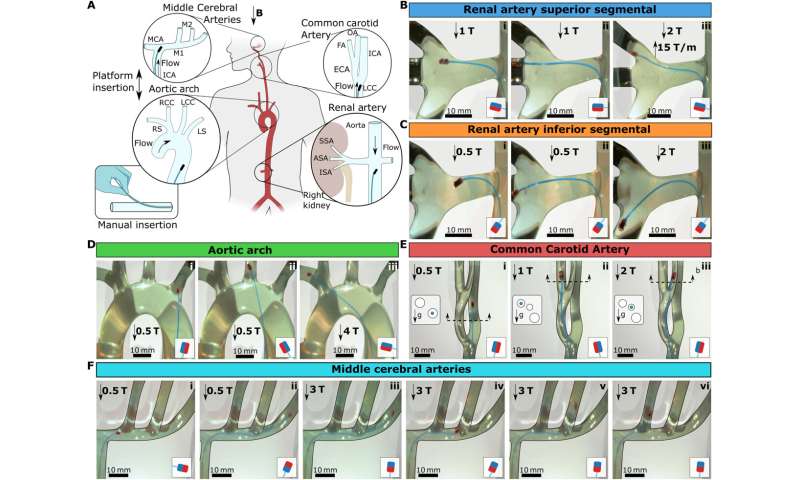
3D vascular navigation under physiological flow. (A) Schematic illustration of 3D vasculature phantoms emulating the 3D vasculature. Four different vascular models have been tested: renal artery, aortic arch, CCA, and MCAs. The guidewires in the schematics depicted the insertion directions, and the flow arrows showed the physiological flow's inlet direction. The guidewire was introduced through a small insertion in the water pipe via a Teflon tube to simulate the groin access, as shown in the bottom left corner. (B) Guidewire steering to the superior segmental artery (SSA). (C) Guidewire steering to the inferior segmental artery (ISA). (D) Guidewire steering to the aortic arch. (E) Guidewire steering to the left CCA. The cross-sections of the vascular structure were given on the left of each frame to show the 3D alignment of the tubes and the gravity direction. The blue circles in the cross section show the branch guidewire is located. (F) Guidewire steering in MCAs. The magnetic configurations are shown in the small schematic in each frame. Scale bars, 10 mm. Credit: Science Advances (2023). DOI: 10.1126/sciadv.adg6438 -
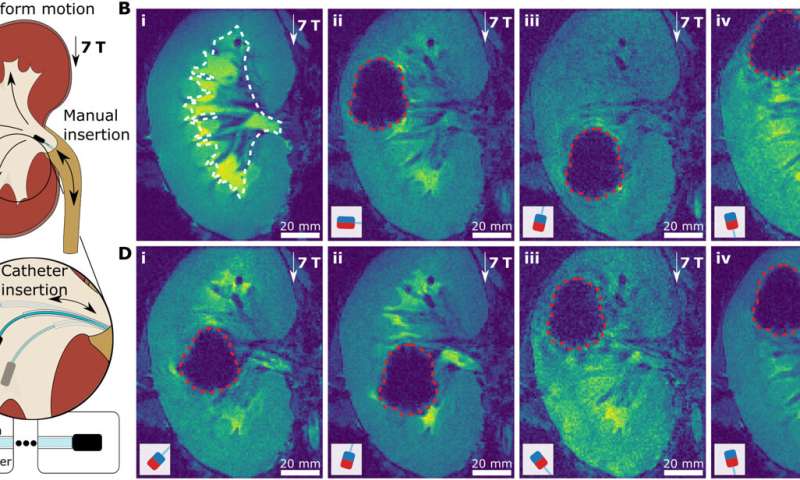
UHF guidewire steering during MRI. (A) Schematic illustration of a navigation experiment in a renal cavity of a porcine kidney ex vivo. The kidney was placed at the MRI imaging center, i.e., uniform 7-T magnetic field, and not moved during guidewire steering in the renal cavity. The guidewire was inserted through the urethra. The three target directions and corresponding magnetic tip configurations are shown. (B) MR images of guidewire insertion. The approximate boundaries of the renal cavity were shown with white dashed lines on the preoperational MRI image of the kidney (i). Then, the real-time MR image snapshots of the guidewires with perpendicular (ii), antiparallel (iii), and parallel (iv) magnets were shown in the renal cavity. (C) Supporting catheter-based steering of the guidewire. The three cases of different guidewire free lengths are depicted for antiparallel magnet configuration. The free-length ruler with the supporting catheter is shown at the bottom. (D) MR images of guidewire steering. The guidewire with the antiparallel magnet, as shown in (i) and (ii), with guidewire free lengths of 0 and 20 mm, respectively. The guidewire with the parallel magnet, as shown in (iii) and (iv), with guidewire free lengths of 0 and 20 mm, respectively. The boundaries of the tip magnet MR image artifacts are shown with red dashed lines. The magnetic configurations are shown in the small schematic in each frame. Scale bars, 20 mm. Credit: Science Advances (2023). DOI: 10.1126/sciadv.adg6438
Outlook
In this way, Mehmet Tiryaki and colleagues introduced the concept of magnetic steering with magnetic guidewires at ultrahigh fields. They combined the theory of magnetism with mechanics to establish design principles for improved steering capabilities in the MRI scanner.
The physicists determined the feasibility of magnetic guidance steering during MRI imaging via a series of 3D navigation steps. They expect the new method of ultrahigh field actuation to impact clinical scenarios during MRI intervention to eventually facilitate physical intelligence required for automated clinical intervention practices.
More information: Mehmet Efe Tiryaki et al, Magnetic guidewire steering at ultrahigh magnetic fields, Science Advances (2023). DOI: 10.1126/sciadv.adg6438
Martin Francis Phelan et al, Heat‐Mitigated Design and Lorentz Force‐Based Steering of an MRI‐Driven Microcatheter toward Minimally Invasive Surgery, Advanced Science (2022). DOI: 10.1002/advs.202105352
© 2023 Science X Network




















